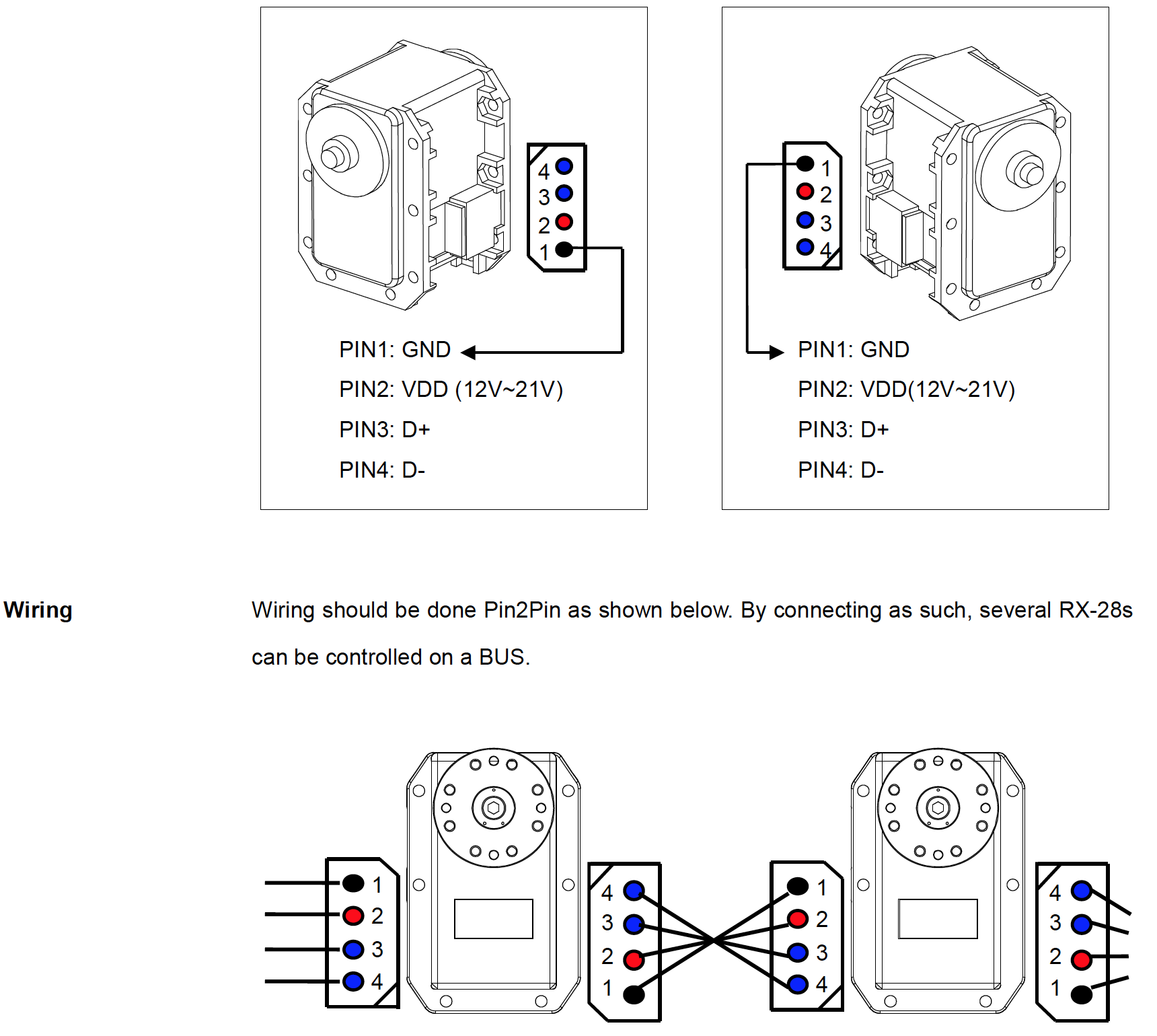
一定要注意 MX-28R 的两边的 RS485 接口线序时不同的,从主舵轮方向观察,左侧跟右侧的线序刚刚好相反,在上电之前一定要反复检查接线顺序,否则可能损坏设备。如下图:
需要一个 RS485/TTL 与 USB 协议转换板。网上跟 Dynamixel 相关的转换板都非常昂贵,其实这块板仅仅是协议转换,没有其他额外的附加功能,推荐使用国内飞特 舵机的调试板。没错,这块板可以正常的调试 Dynamixel 的舵机。关键是价格便宜,实惠,功能完整,整体做工也是非常不错。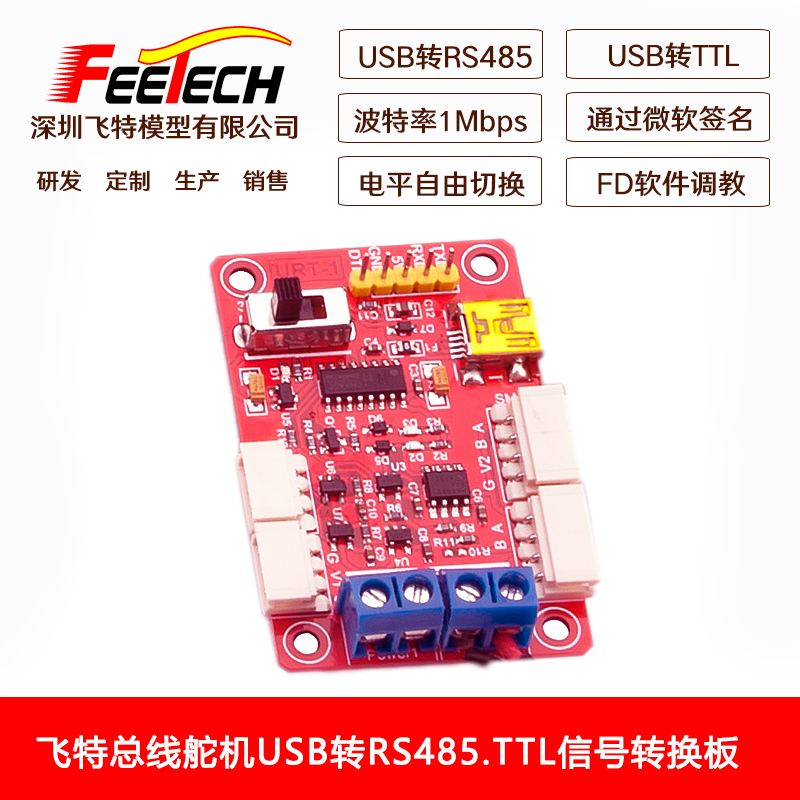
只是接线的时候,要注意,飞特 控制板上 RS485 接口的标注 G/V2/B/A,而 Dynamixel 舵机标注的是 GND/VDD/D+/D-两者的对应关系为 G → GND/V2 → VDD/D+ → A/D- → B,这个线序要注意调整。
需要去 Dynamixel官网下载 Dynamixel Wizard 2.0 但是这个网站上的文件国内下载比较困难,可以本站下载一份拷贝,如下:
Windows下载 DynamixelWizard2Setup_x86_v2.0.3.exe
Linux下载 DynamixelWizard2Setup_x64_v2.0.3
检测电机信息
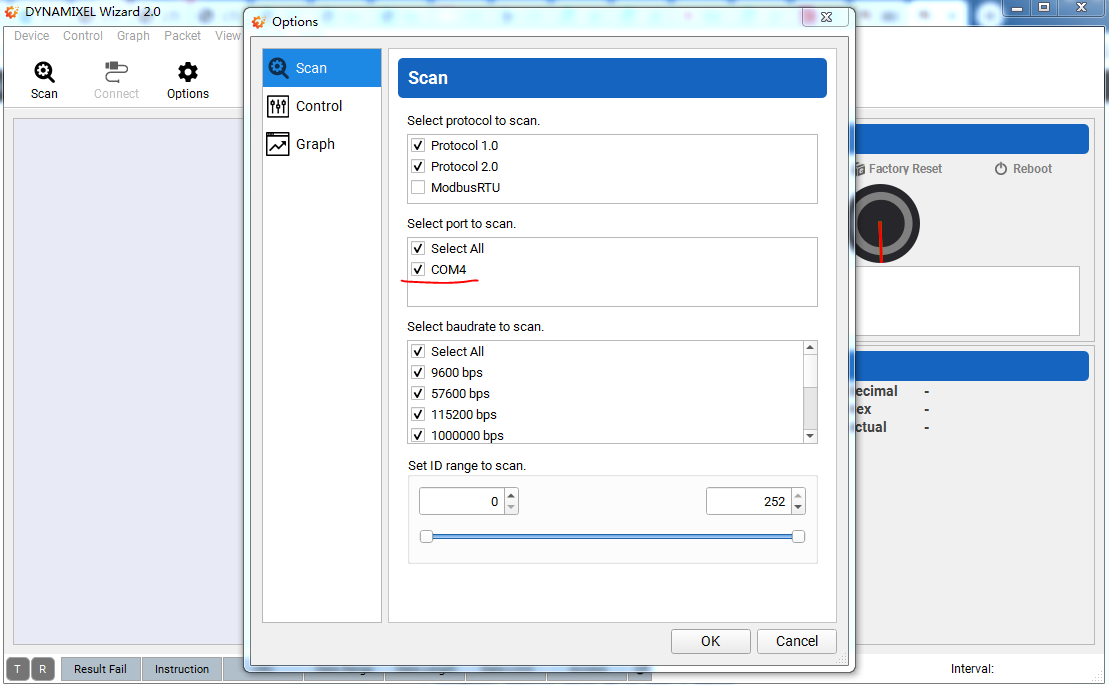
 指定通讯端口:
指定通讯端口: 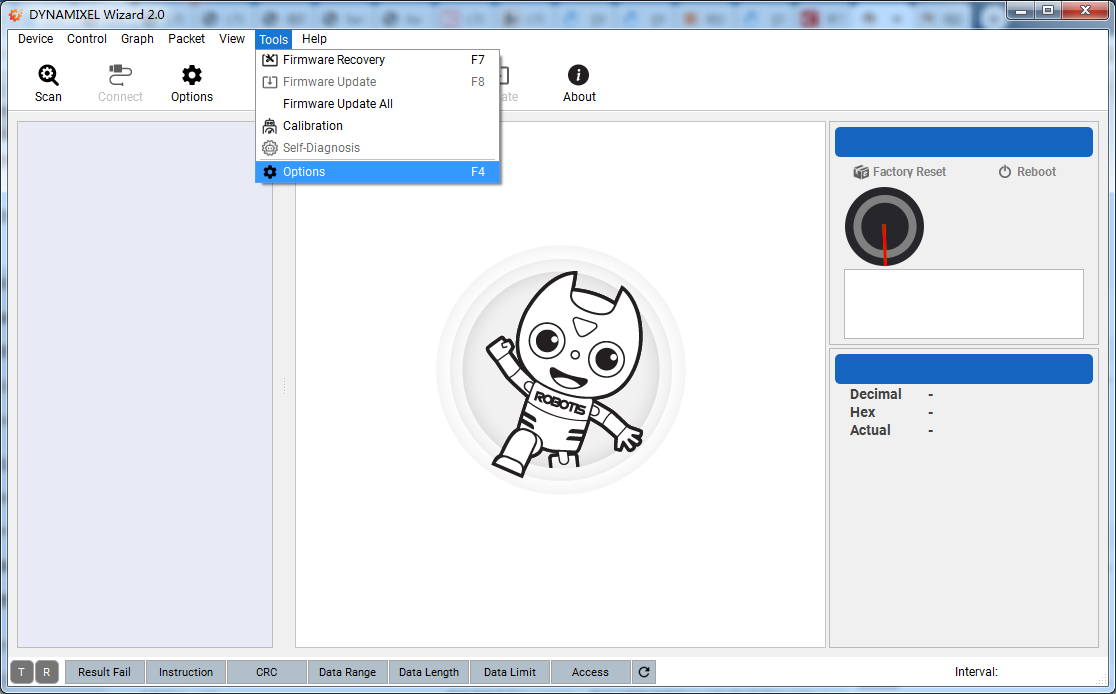
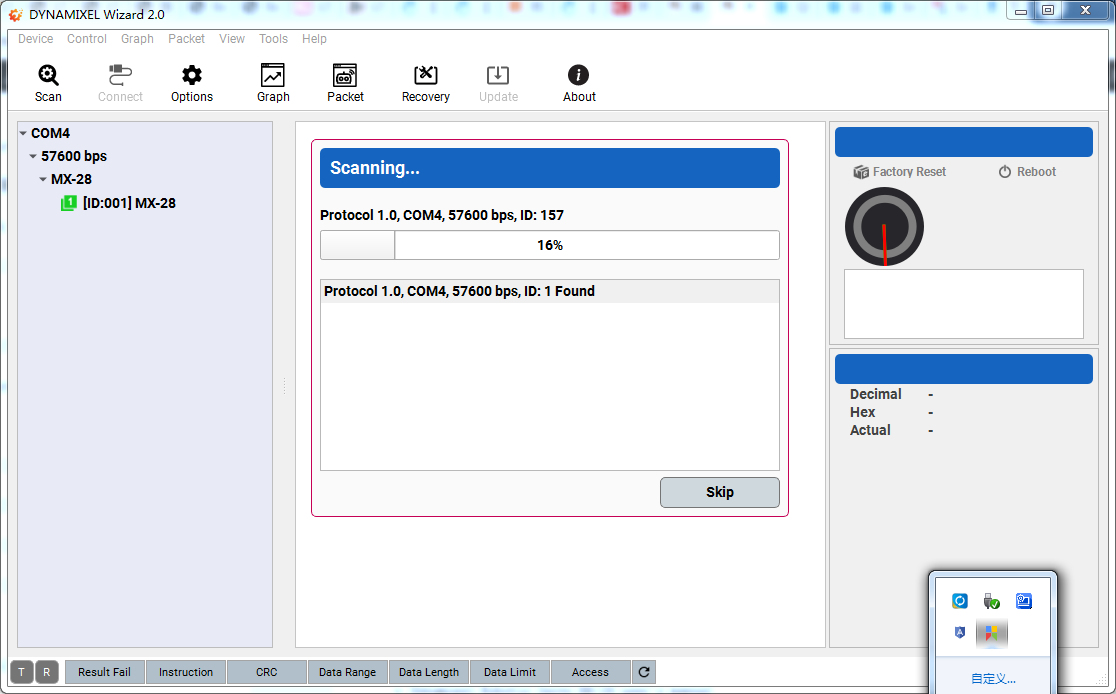
 选择扫描设备:
选择扫描设备: 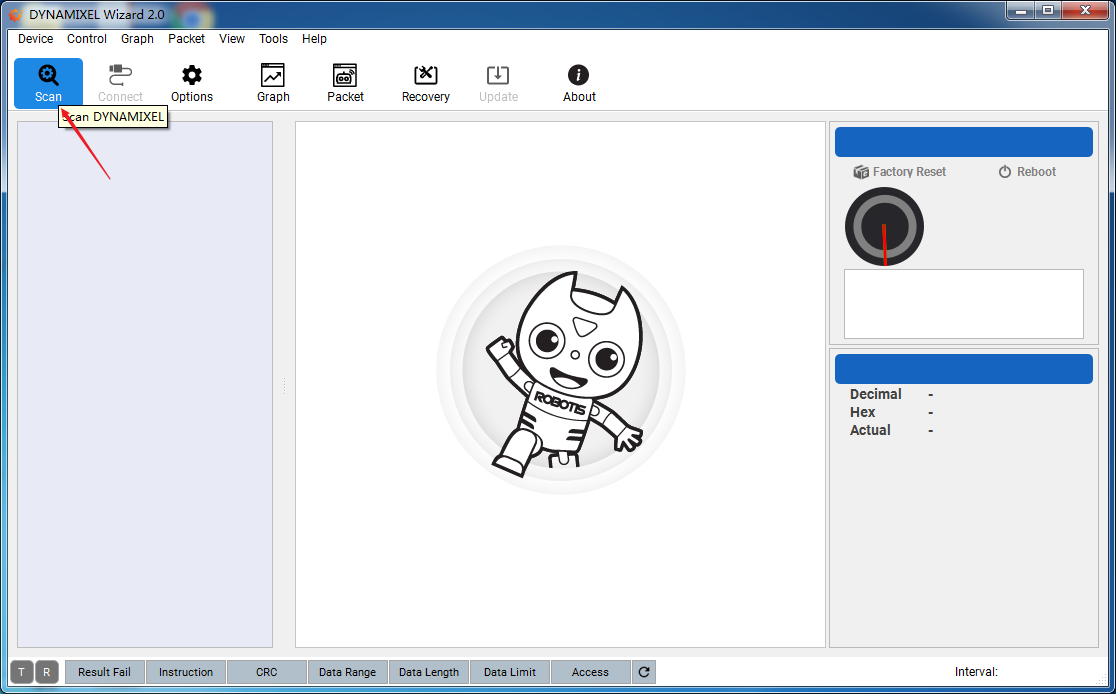
 设备信息如下:
设备信息如下: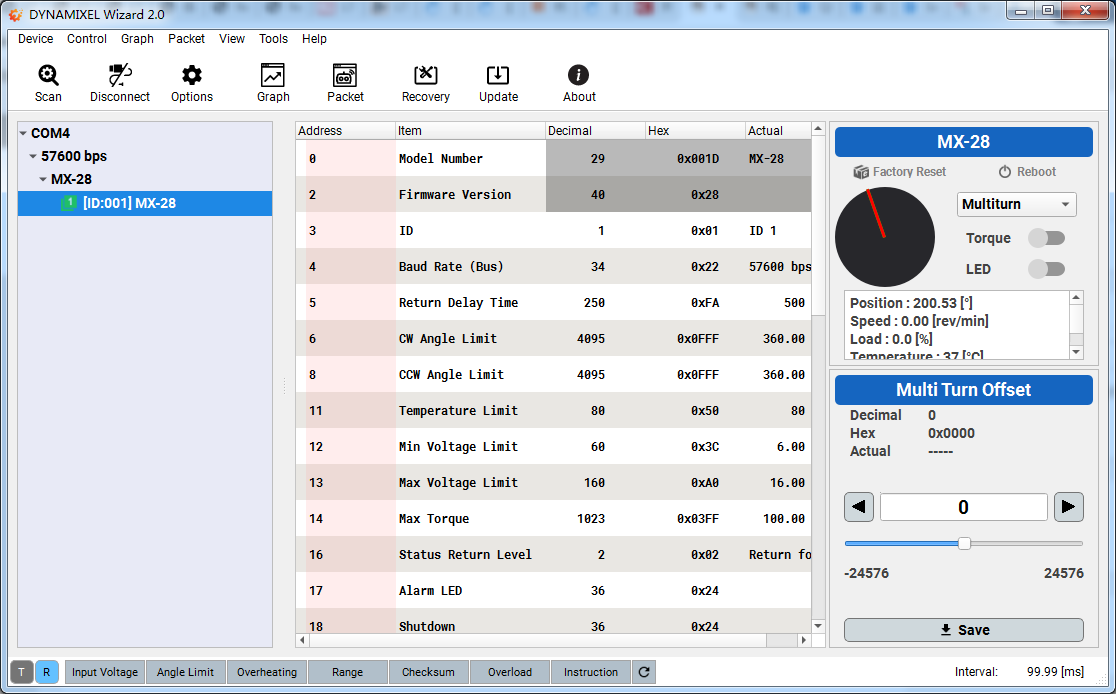 观察电机转动情况,检测是否正常(注意右上角电机工作模式选择 Multiturn 其它选项不便于观察转动情况):
观察电机转动情况,检测是否正常(注意右上角电机工作模式选择 Multiturn 其它选项不便于观察转动情况):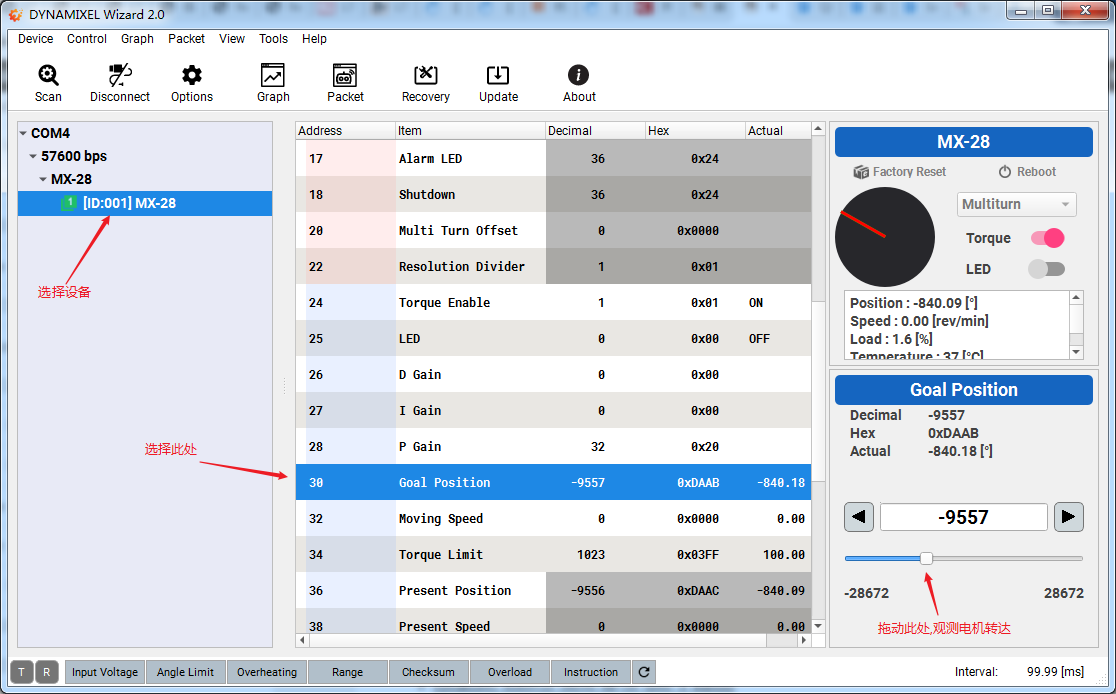
升级固件
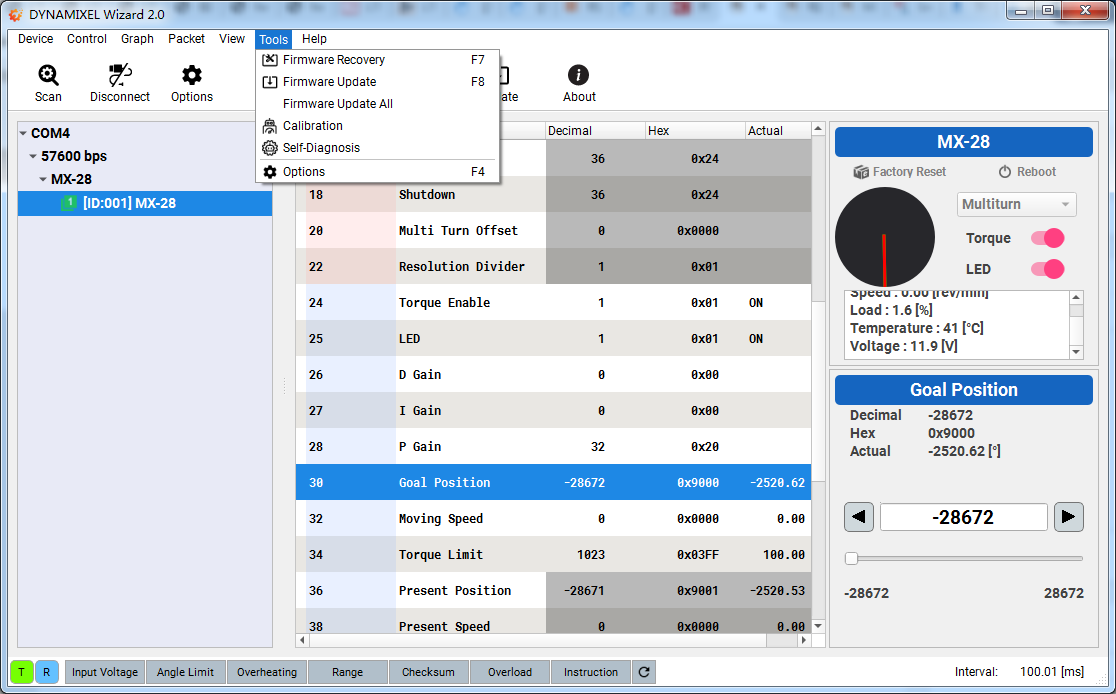 固件升级一般都会失败,但是不要担心,失败并不是大问题,如果发生升级失败,则选择 "Firmware Recovery" 然后根据提示,恢复固件即可,不会出现刷死的情况。
固件升级一般都会失败,但是不要担心,失败并不是大问题,如果发生升级失败,则选择 "Firmware Recovery" 然后根据提示,恢复固件即可,不会出现刷死的情况。
自定义报文
这部分一定要在主界面断开连接,参考下图: 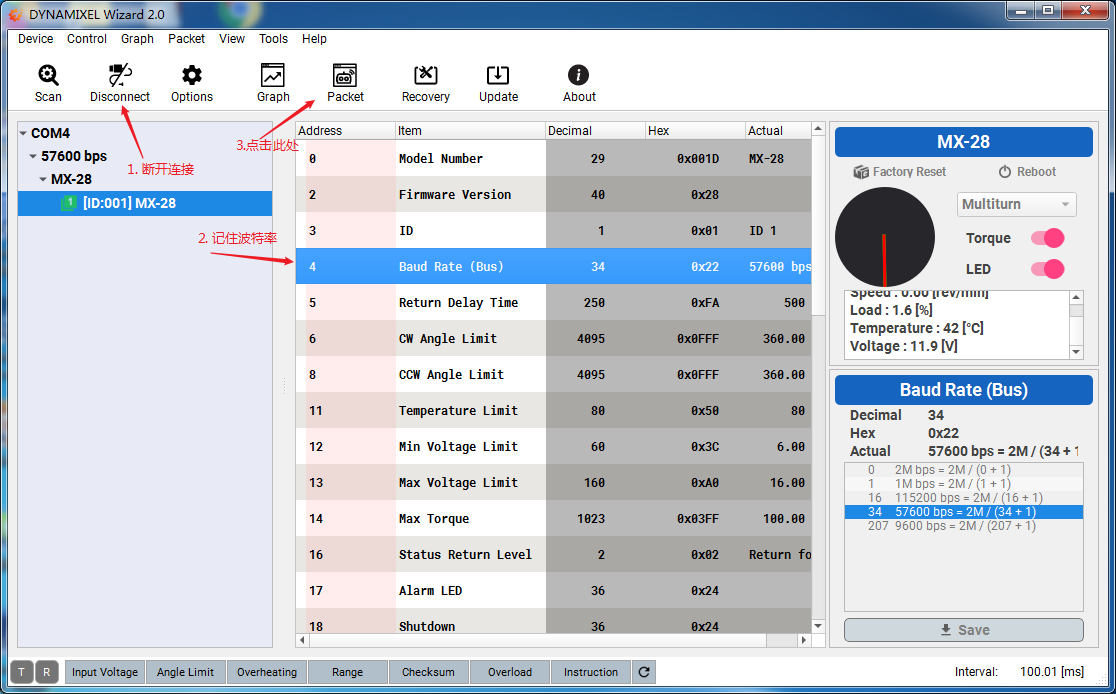
参考接线
 我这边使用了 小芽科技 的供电模块来供电,实际上是不是必须的,只是为了方便供电而已。飞特 舵机的调试板的供电部分直接供电也是没有任何问题的。
我这边使用了 小芽科技 的供电模块来供电,实际上是不是必须的,只是为了方便供电而已。飞特 舵机的调试板的供电部分直接供电也是没有任何问题的。
大神能给指点指点怎么写id吗,付费考虑下?
ID部分可直接在配置软件中设置的,这个参考 https://www.mobibrw.com/wp-content/uploads/2019/09/Snipaste_2019-09-02_05-33-04.png 这个图片中的 ID部分,你点击它,应该可以显示修改的编辑框的。