最近折腾了一下四轴飞行器,于是在淘宝上买了一套“图腾Q250 FPV穿越机架组装套装”,整个的装备如下图所示。

整个的组装,调试过程相当的心酸,主要还是经验不足,导致了一系列的调试问题。
我是在淘宝这家店买的套装 王子模型世界 不得不吐槽一下店家确实没有什么售后,一切都是要靠自己摸索前进。
目录
1.配件选择
店家给的配件如下:
包装清单
1 x Q250 迷你四轴机架
4 x 银燕EMAX MT2204 KV2300 电机(含16颗螺丝)
4 x 12A电调
1 x CC3D飞控板
1 x FS-I6 遥控器
1 x 遥控挂带
4 x 5030桨(黑色和黄色正反桨)
1 x ST 动力电池
1 x E3 充电器
1 x BB响
送线材配件:
(1)送1条15cm反扣魔术贴扎带
(2)送2根20cm的航模耐高温硅胶线 (红色和黑色各一根)
(3)送2根10cm的热缩管.(Φ4.0mm ) (红色和黑色各一根)
(4)送1根50cm的热缩管.(Φ3.0mm ) (黑色)
(5)送T型插头1个(公头)
(6)送10根尼龙扎带
(7)送 2.00MM香蕉头(公母各12个)
这些配件看起来很多,但是其实有很多是远远不够的,比如红色标注的部分。
主要原因是新手,往往会反反复复的修改,导致耗材不够用。
要注意以下几点:
- CC3D飞控板
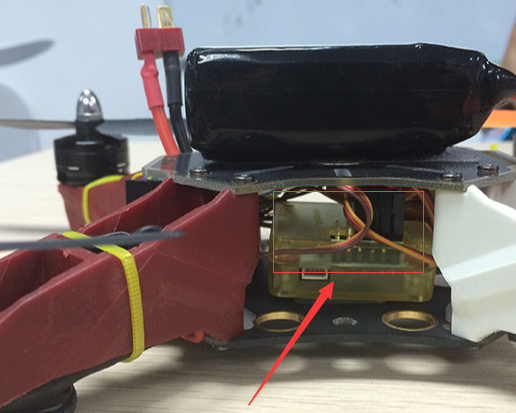
CC3D飞控板分为弯针跟直针的版本,店家给出的图片是弯针版本的图片,但发货的却是直针的版本。两者在功能上面没什么差别,但是直针版本的,由于针脚高度的问题,导致了超过高度,在这款机架中空间狭窄,导致比较难操作,因此购买的时候,一定要求卖家发弯针的版本!
弯针与直针版本如图所示

如果你想把直针版本的按照店家图片上的安装方式来安装,会发现非常的狭窄,拥挤,难以操作。
如下图所示,整个挤压在一起,太难操作了点。
- 5030桨

店家附赠的四条正反桨叶,是绝对不够用的,仅仅在试飞阶段,基本上就全部报废掉了,因此,建议直接追加20套吧,反正也不贵,基本上一块钱一对的样子,这样还省了邮费跟时间。注意,螺旋桨分为正反两种,购买的时候,正反各一半,不要买错。
- 尼龙扎带

属于严重的耗材,店家赠送的,必须是刚刚好一次成功,才勉强够用。其实根本不够用,建议到文具店去买好了,十块钱一袋子,有一百多根,我反复折腾,差不多消耗了30根的样子。
- 银燕EMAX MT2204 KV2300 电机
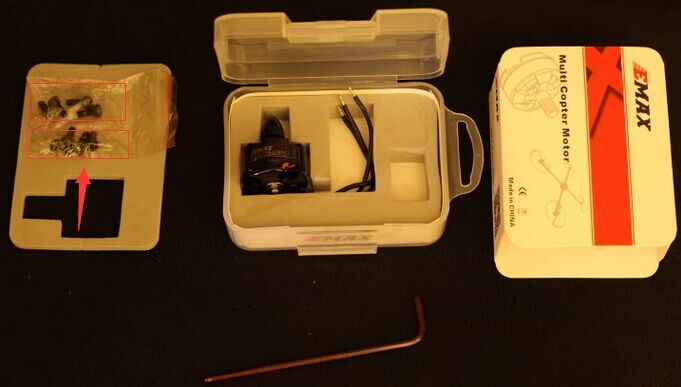
需要注意的是,该电机配备了8颗螺丝,4颗为一组,一组比较长,一组比较短。我们在本次组装的时候,一定要采用比较短的那一组,如果螺丝太长,可能会在拧紧的时候,接触到电机的漆包线,导致短路,烧毁电机。
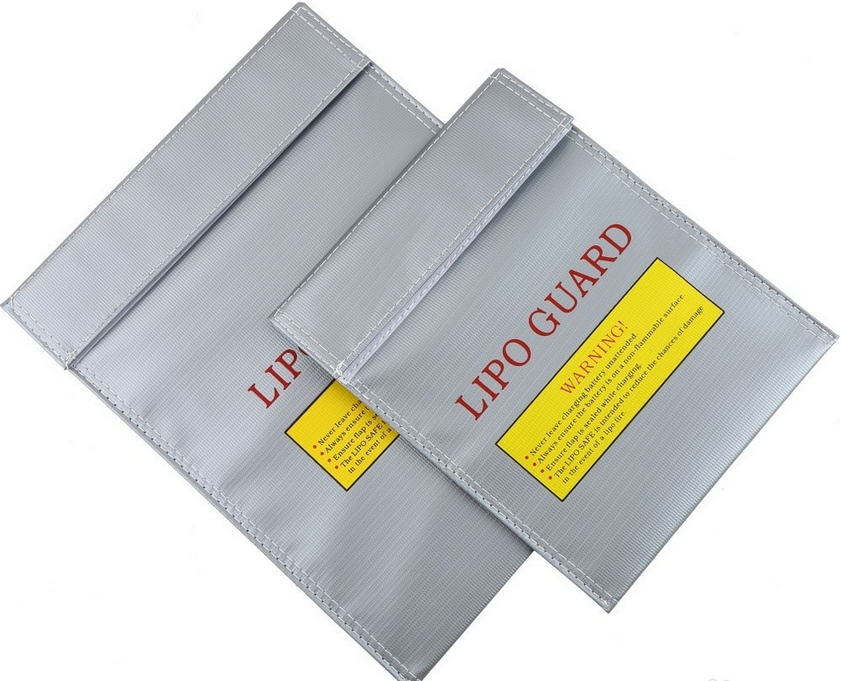
- 锂电池防爆袋
强烈建议购买两个,价格在几十块钱左右,主要是我们使用的锂电池是“动力锂电池”,这种锂电池实质上就是拿掉了过流保护板的锂电池,放电电流极大,一旦短路,后果不堪设想,有兴趣可以优酷搜索一下相关的视频。我前面几次操作都是手抖着插T型开关的,每次插上都冒火星,心里直冒汗。
实物如下图所示:
2.基础知识
- 正反转电机
从电机的正上方向下观看,顺时针旋转的电机为正向电机,逆时针旋转的电机为反转电机。
旋转方向反向后,问题不大,但是建议按照这个规则来安装电机。
- 自锁(自紧)电机
电机按照规定的方向旋转,电机的螺帽会自动锁紧,而不是脱落。这种电机有规定的转动方向,如果转动方向反了,则螺帽非常容易从电机上面脱落,导致螺旋桨容易被甩出。而如果旋转方向正确,则螺帽会越来越紧,紧紧卡住螺旋桨。

银燕EMAX MT2204 KV2300 电机 属于自锁电机,螺帽分为白色,黑色两种,白色螺帽的电机必须逆时针旋转,安装反桨。黑色螺帽的电机必须顺时针旋转安装正桨。
区分自锁(自紧)电机转向是否正确的简单方法,电机的螺帽拧到一半,或者刚刚拧上一点点,然后上电,让电机旋转,如果螺母自动拧紧,则代表方向正确,如果螺母飞掉或者松动了,则说明方向反了。
- 正反螺旋桨
四轴飞行器为了抵消螺旋桨的自旋,相隔的桨旋转方向是不一样的,所以需要正反桨。正反桨的风都向下吹。顺时针旋转的叫正桨、逆时针旋转的是反桨。安装的时候,一定记得无论正反桨,有字的一面是向上的。
对于5030桨,印有5030R的为正桨,印有5030的为反桨。
- 机头
四轴飞行器向前飞的方向,称之为“机头”。机头在CC3D的板子上面已经用一个三角箭头标识出来了。如图所示
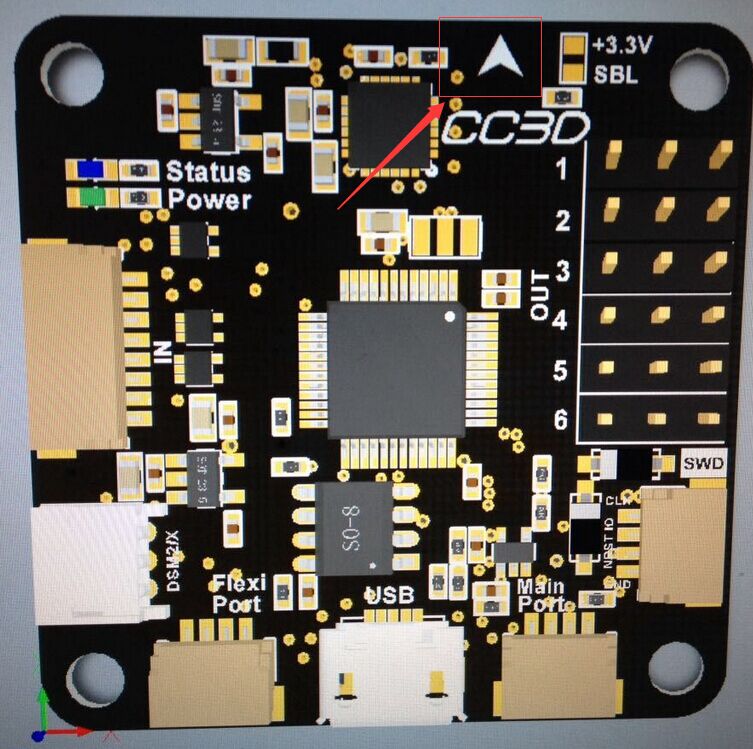
对于有外壳的CC3D,外壳上面一般也会标识出机头方向。

3.正式组装
- 组装机架
参考大疆F450的安装手册,两者的安装规则差不多。
F450_User_Manual_v2.1_cn
注意,先焊线,后组装
焊接线的时候,依据红正黑负的原则,红色电源线焊接到正极,黑色电源线焊接到板子上面的负极。具体的焊接如图所示(注意,这个图片是F450的接线图,其中连接电池部分与QV250的接线图有所不同):
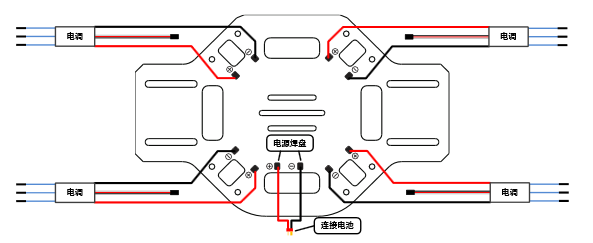
组装完成后的机架,如下图所示(没有焊接线路):

电机,电调安装完成后的样子,如图所示(窃取的别人的图片):

不建议大家按照上图的方式排布电调,主要是电调的发热量还是很大的,两个挤压在一起的话,散热很成问题。建议按照下图的方式安装电调:

- 焊接香焦头
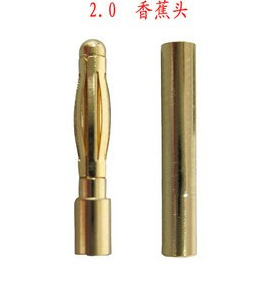
之所以单独把这部分拎出来讲一下,主要是,当我打开包装的时候,看见一大堆这玩意,犯迷糊了,不知道哪里的零件!
香蕉头是连接电调跟电机部分用的,因为我们往往需要调整电机转动的方向,因此,连接线不能直接焊死,否则比较麻烦,所以用香蕉头来,方便重新插拔。香焦头分公母,如上图所示。
电调三根线,需要三个公(或者母)的香焦头,电机上的三根线也是需要三个香焦头(如果电调端用公头,对应的电机端就要用母头)。
焊接好后差不多是这个样子的:

电调跟电机插上后,注意用热缩管绝缘,否则可能短路烧掉!
- 连接飞控
以上操作都差不多完成了,就可以连接CC3D跟电调的连线了。
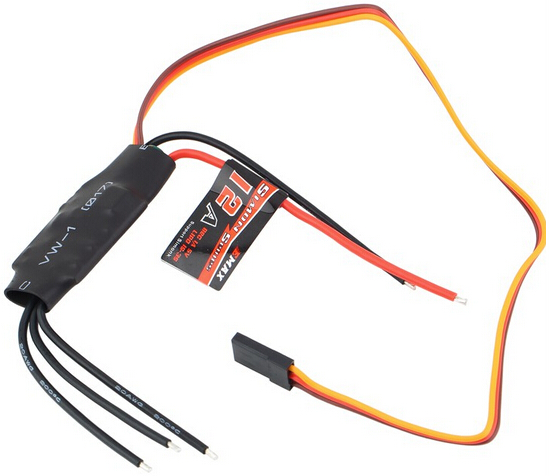
可以看到,银燕12A电调上有三根线,分别是黄色,红色,棕色。其中,信号线只有一根,另外两根是供电线,目的是给CC3D芯片提供电源。其中黄色线为信号线,红色为正极,棕色为负极。
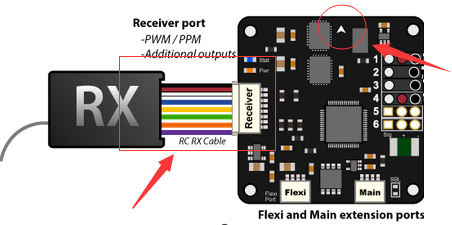
刚刚好对应下图的CC3D接线示意图,Signal 为信号线,Vcc正极,Gnd负极。
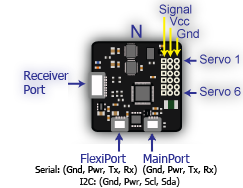
有一个问题就是,我们有四个电调,因此如果都插上,也就变成了四路供电,会不会把CC3D烧掉?我当时就蛮担心这个问题的,结论就是,没问题了,放心插上就可以了,只是正负极不要搞反掉就好了!
- 连接遥控器
这部分的难度,主要是管脚的确定,关键是供电管脚,其他管脚可以随便接入的,后期可以在软件设置的时候进行更改调整。
CC3D与遥控器相关的管脚信息如下表:
| 颜色 | 功能 | CC3D主板针脚 | 遥控器针脚 |
| 黑色 | 地线(负极,给遥控器供电) | 1 | 1 |
| 红色 | 正极(4.8V - 15V,给遥控器供电) | 2 | 1 |
| 白色 | PWM 信号输入通道 1 或 PPM+NoOneShot 信号输入通道 | 3 | 1 |
| 蓝色 | PWM 信号输入通道 2 | 4 | 2 |
| 黄色 | PWM 信号输入通道 3 或 PWM 信号输出通道 7 | 5 | 3 |
| 绿色 | PWM 信号输入通道 4 或 PWM 信号输出通道 8 | 6 | 4 |
| 紫色 | PWM 信号输入通道 5 或 PWM 信号输出通道 9 | 7 | 5 |
| 橙色 | PWM 信号输入通道 6 或 PWM 信号输出通道 10 或 PPM+OneShot 信号输入通道 | 8 | 6 |
上面是CC3D芯片的管脚示意图。
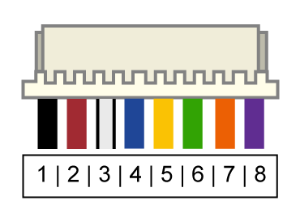
接下来是 FS-I6 遥控器的接收模块的管脚示意图,如下图所示:
注意,这里面有七个插头,从下面到上面是 1-6号PWM通道,对应上面的CC3D的六根信号输入线。最上面的一根信号线留空即可。信号线右边的两根插头是供电插头,其中的任意一组接入CC3D的电源输出接口就可以了,其他都留空就可以了!
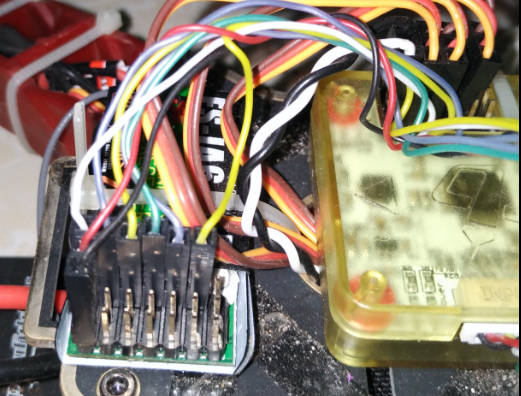
我的接线图如下图所示:
完整的说明书点击下载富斯i6说明书FS-i6-MANUAL
4.软件调试
注意,到这一步的时候,还不能安装螺旋桨,主要是为了安全。
- 地面站的安装
目前随着最新的OpenPilot Revolution(CC3D REVO)的发布,OpenPilot GCS软件对于早期的CC3D芯片的支持是到15.02.02版本,最新的版本 15.05.02貌似只支持CC3D REVO 。
早期版本用户请点击这里下载 OpenPilot 15.02.02
CC3D REVO 用户请点击下载 OpenPilot 15.05.02
默认安装,一路Next即可。安装最后窗口弹出提示安装驱动,点击确认安装即可。安装驱动程序之后用数据线将CC3D与电脑连接,有可能你的电脑会提示该驱动安装未成功,在设备管理器里COM端口有出现但是Copter Control黄色感叹号标识,如下图所示。这个时候,其实上位机和CC3D飞控已经可以正常通信。
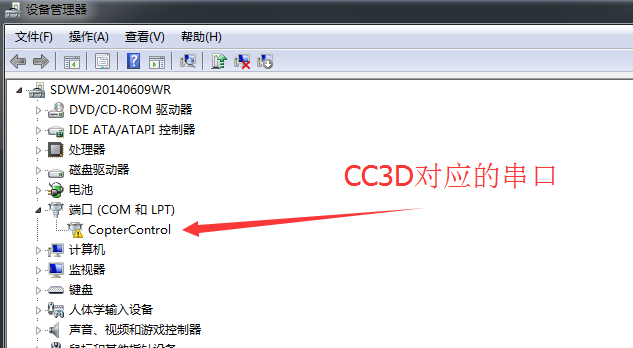
目前的Window 10已经可以自动识别,并且自动安装驱动,一般不会出现这类现象了。
- CC3D向导配置
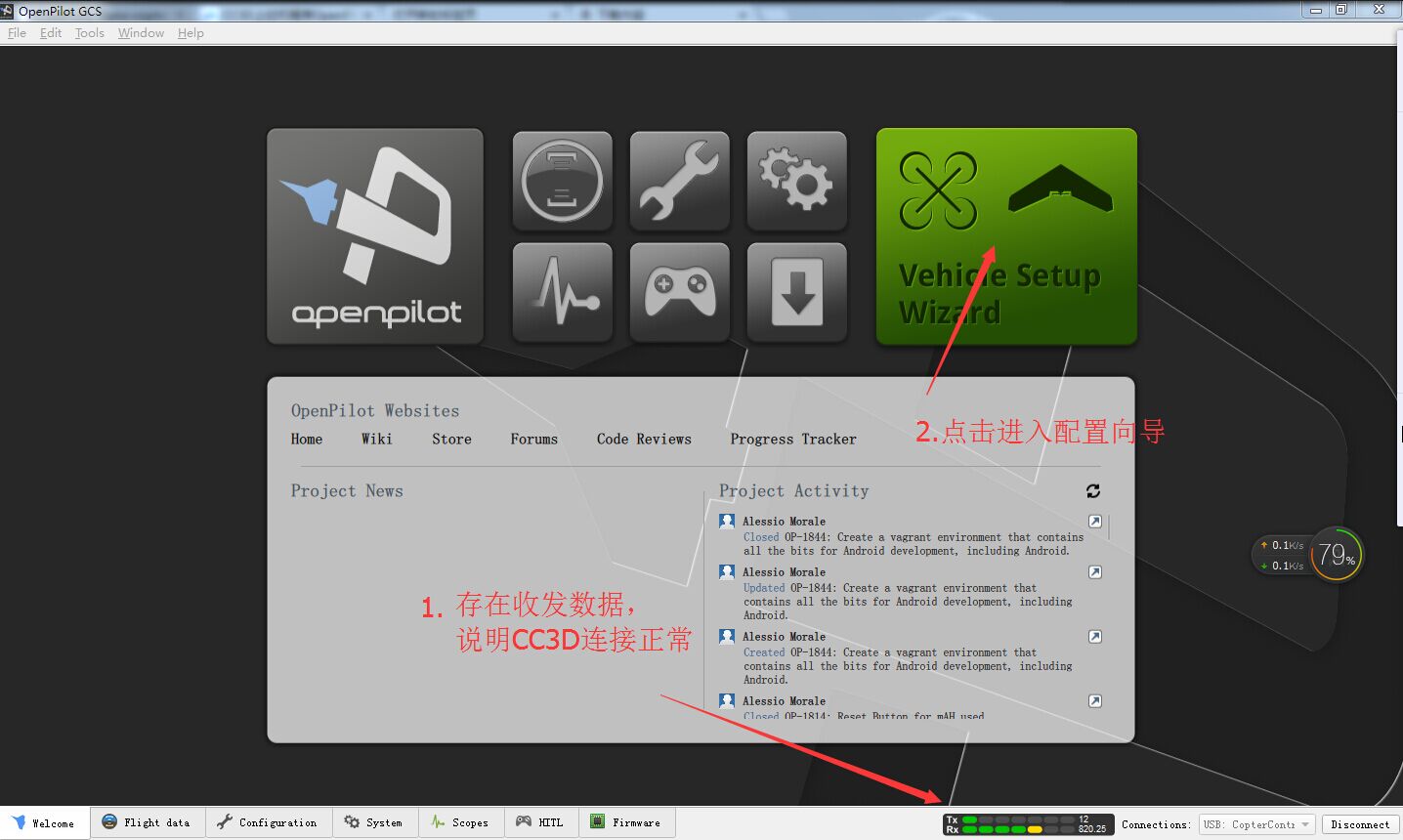
进入地面站,首先查看端口通信是否连接,点击Vehicle Setup Wizard进入向导配置界面如图所示。
CC3D飞控使用mini USB接口和上位机相连
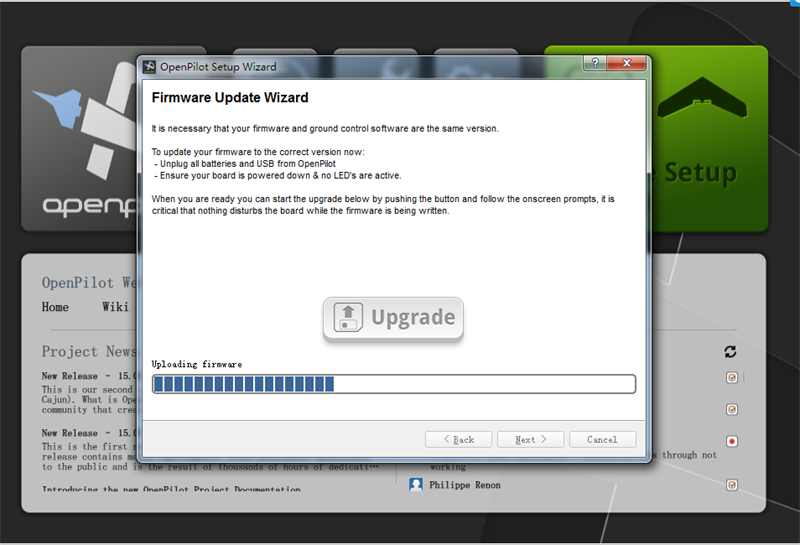
进入设置向导后,会出现红色标识,上位机非常人性的提示在配置之前卸掉桨叶,以防意外发生。Next进入下一界面,固件升级界面,提示你需要将固件版本与地面站版本保持一致,初次配置,建议Upgrade升级固件。升级固件步骤:
- 断开航模电池,拔掉USB线,保证CC3D飞控已经完全断电,没有LED亮起
- 点击Upgrade按钮
- 根据进度条上的提示,待进度条走动时迅速插上USB数据线,地面站将自动写入最新固件。
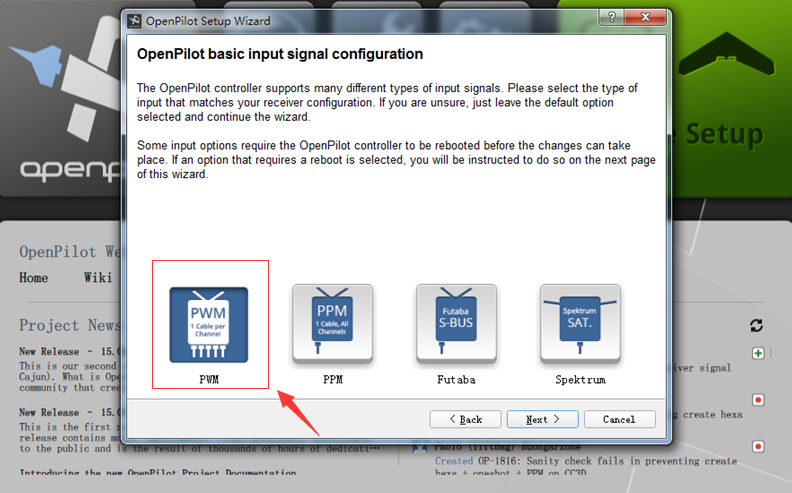
飞控写入最新固件后,Next进入遥控接收器的配置,有PWM/PPM/Futaba/Spektrum四种可选。我们使用的是FS-I6遥控套件,选择PWM通信方式。
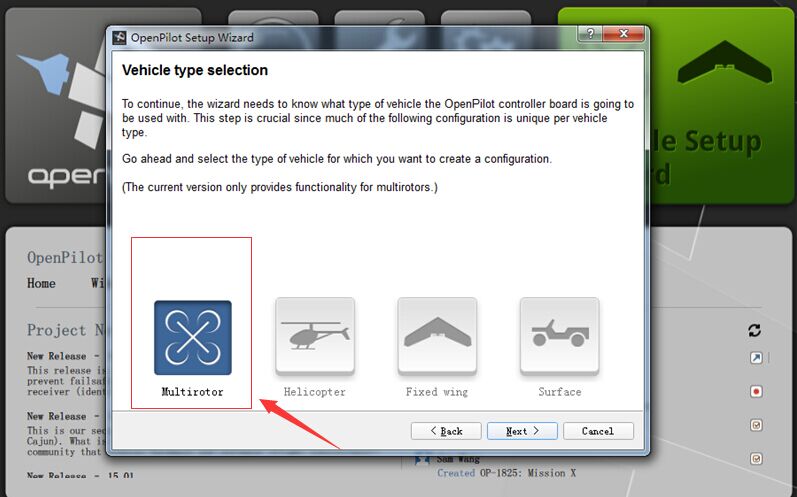
Next下一步将会提示选择飞机的类型,有Multirotor、直升机、固定翼及车类选项,选择Multirotor。
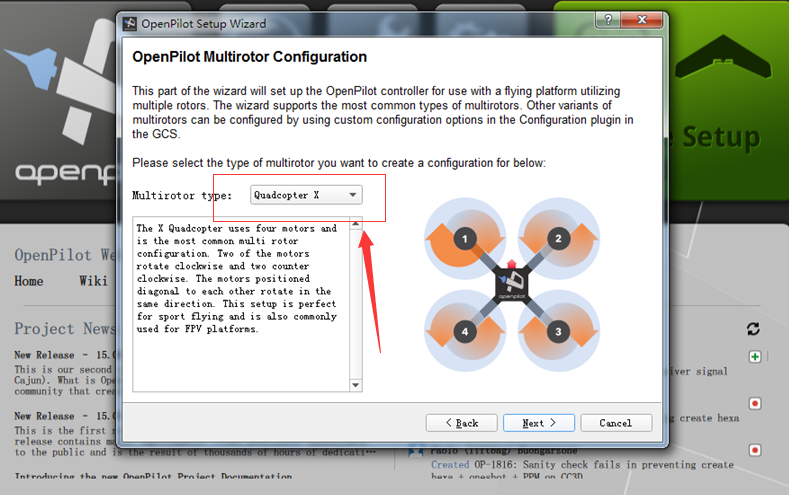
下一步将要选择多轴飞行器的机型,Multirotor type下拉框有三轴、四轴、六轴及各种飞行模式可选,右边窗口将会有示意图示意所选择的类型及各个电机转动的方向。选择四轴飞行器,X模式,即Quadcopter X。
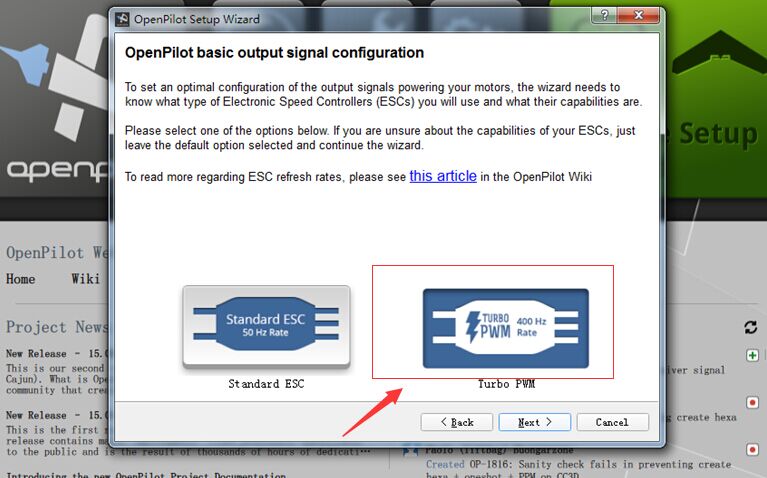
Next下一项进入电调的选择界面,有高速电调和标准电调两项可选,选择对应电调同时还要告知工作信号的类型,H250选择高速电调,银燕的电调,支持高速电调模式;
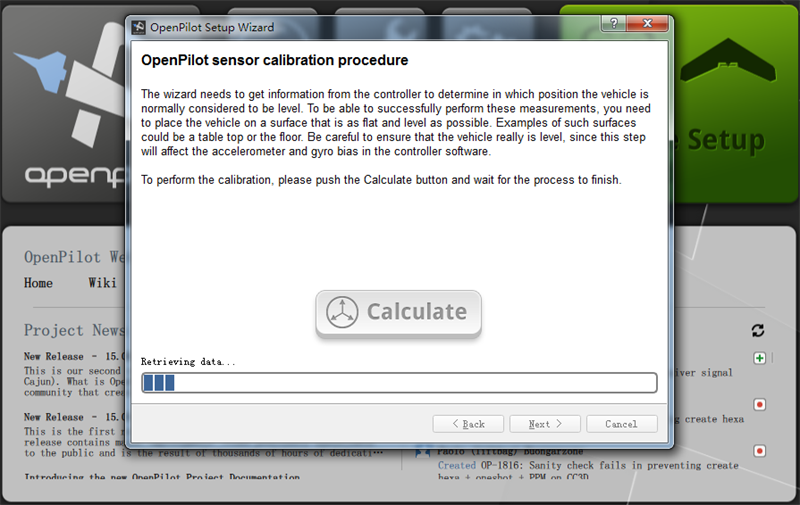
上位机将会把刚刚所配置的信息显示,确认Next,进入传感器校准程序界面。在进入传感器校准之前,需要将飞控板保持水平状态,避免误差。
硬件配置总结:关于配置这块,如果担心记不清楚选项或者初次接触不知如何入设置,我们就按默认选项即可,CC3D的默认选项即可。
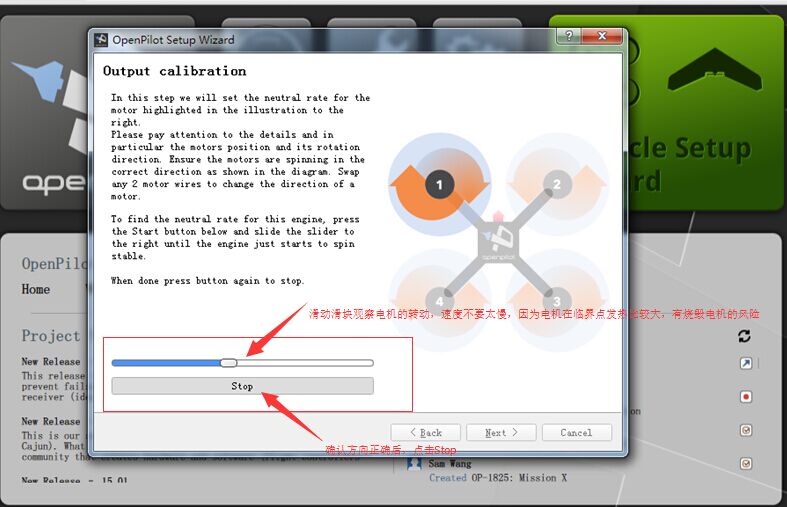
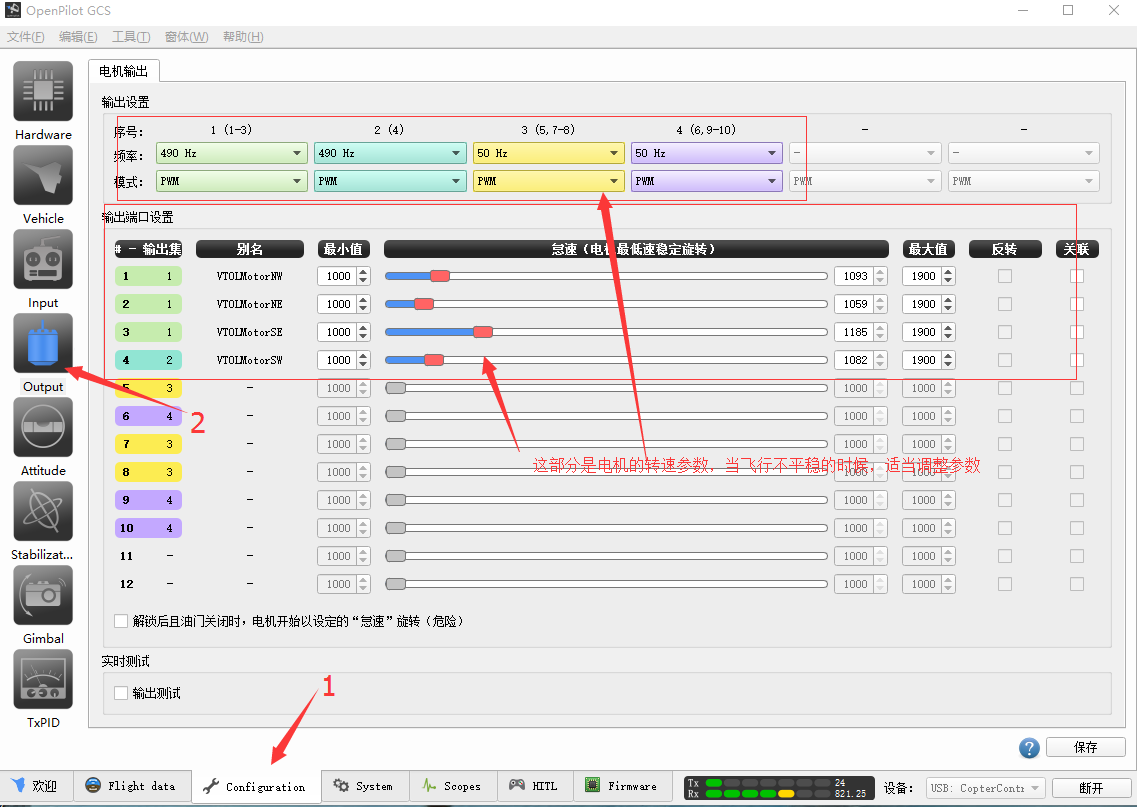
- 电机输出校准
校准传感器Next进入电机输出校准界面。在这里提醒大家卸掉桨叶接通电源!输出校准是设置电机的中性环境。方法是点击Start,鼠标拖动滑块向右移动直到电机转动,然后点击Stop,待电机完全停下,点击开始,观察点击能否自己启动,左右移动滑块调节电机启动的临界点。这里需要注意电机的位置及电机的旋转方向,若电机位置不一致,匹配飞控输出通道与电机所对应电调;若旋转方向不一致,只需将电机的任意两根线互换即可。
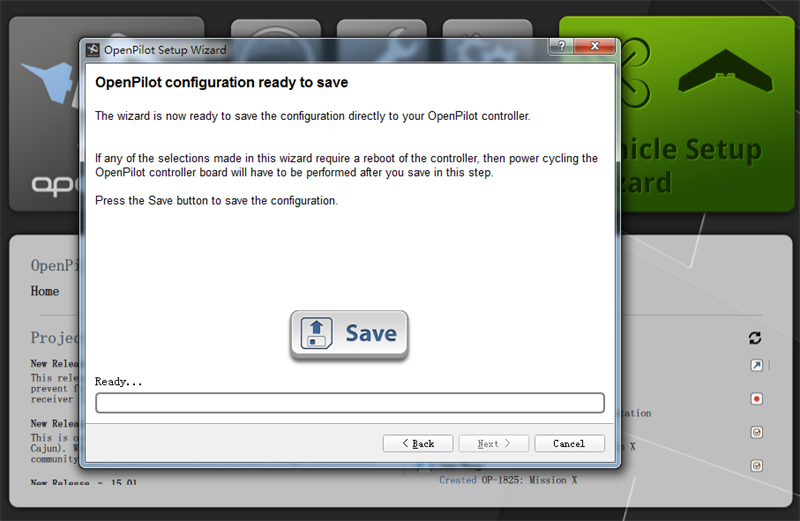
电机2、3、4的输出校准同电机1一样,按照电机1的设置步骤即可。四个电机参数设定之后,Next进入参数写入界面,点击Save。
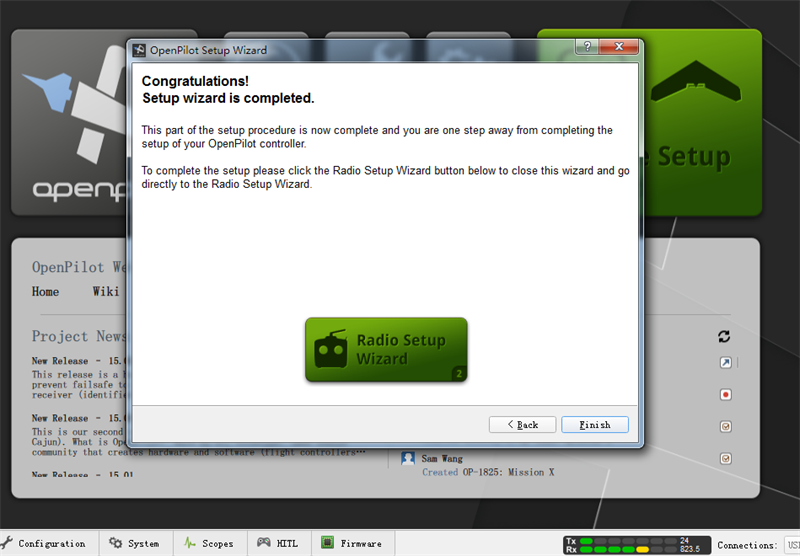
- 遥控器配置
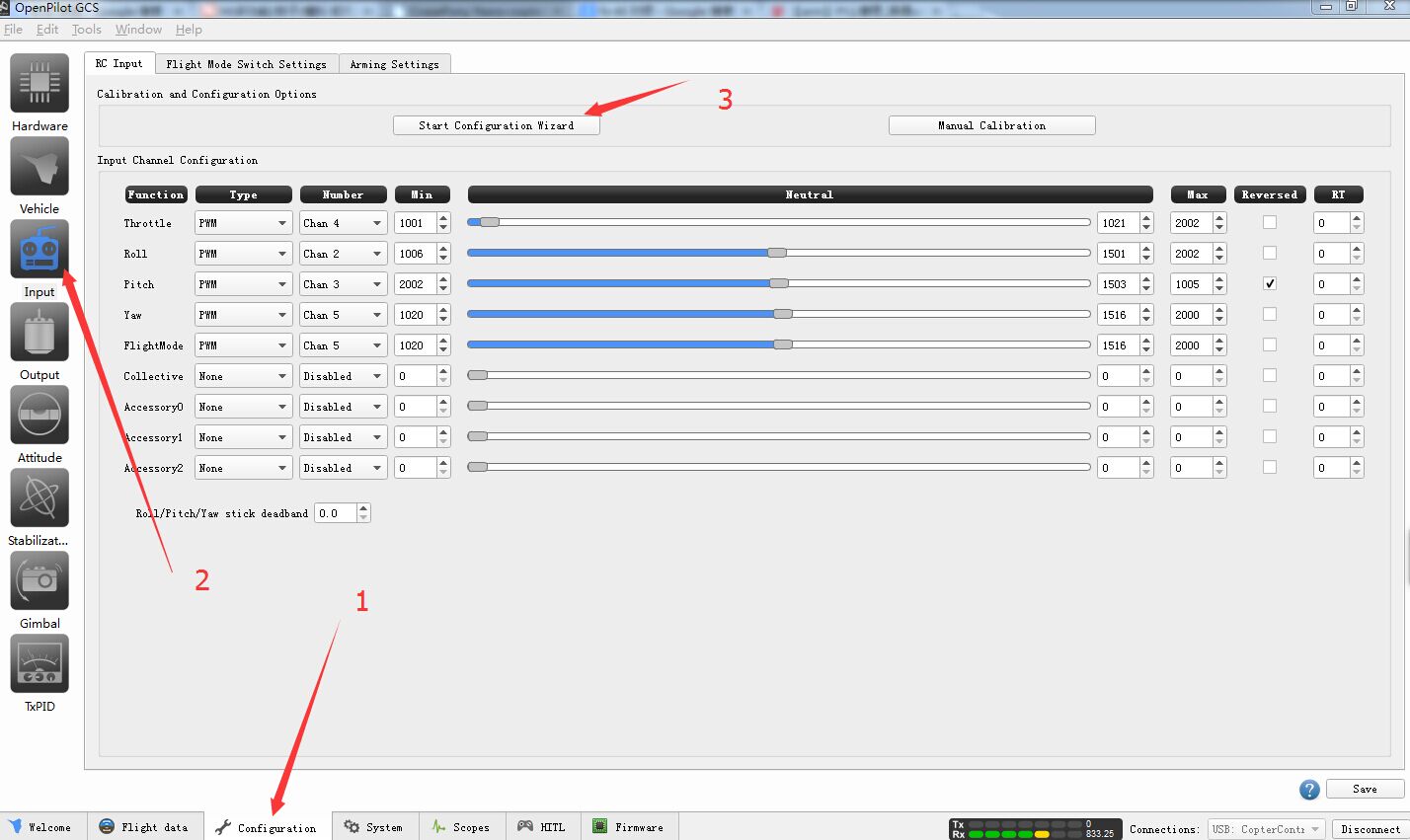
CC3D的地面站在配置遥控时默认把油门解锁关闭,建议配置遥控参数先检查油门有没有锁定,以防配置过程中忘记卸掉电池造成不必要的伤害。承接上面的配置过程,点击Radio Setup Wizard直接进入遥控配置界面。也可以点击Finish退出,从Configuration->Input->Start Configuration Wizard进入配置界面。如下图所示。
进入遥控配置向导后,操作将会提示按照屏幕上的指示去操控遥控杆,任意时刻都可以取消或者返回上一步。将接收器和CC3D连接正确,CC3D使用电池供电,开启遥控器电源。看到接收器FS-R6B上红色的LED亮起,则表示遥控器和接收器连接(对频)成功,可以进行后面的操作。如果LED未亮起,可以从下面几点检查:
- 接收器和CC3D连接是否正确。注意连接线的正反和顺序。
- CC3D电源供电是否开启。测试发现,只使用USB给CC3D供电是无法满足接收器的供电的。
- 接收器和遥控器是否需要对频。
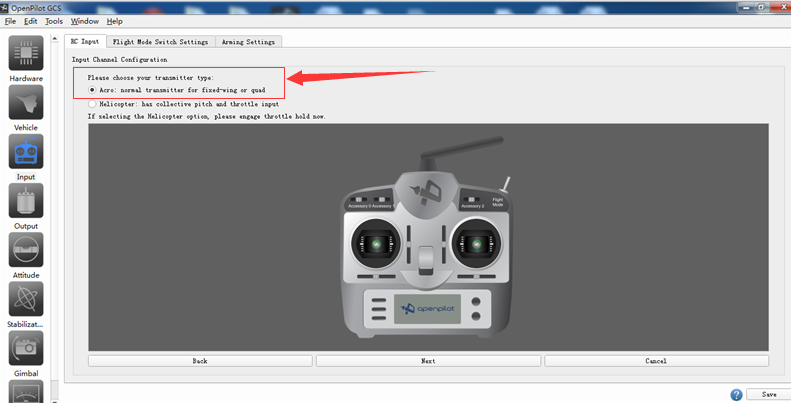
Next,进入遥控器发射机类型选择,Acro类型或者直升机类型。Acro类型适用于固定翼或四轴,我们选择Acro类型。
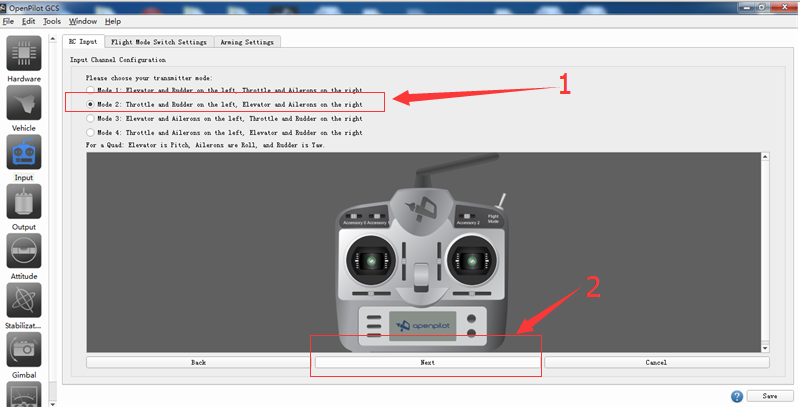
Next,进入遥控器操作模式选择,也就是常说的美国手或者日本手选择。提供4种模式,根据个人习惯去选择,笔者选择默认模式美国手,即Mode 2。油门和方向在左,俯仰和横滚在右。
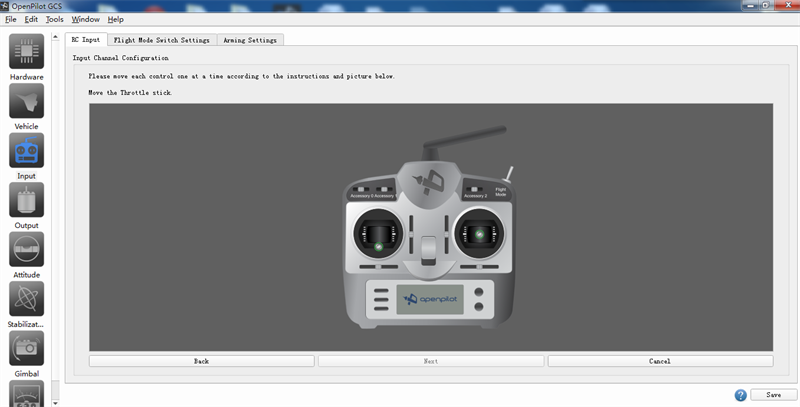
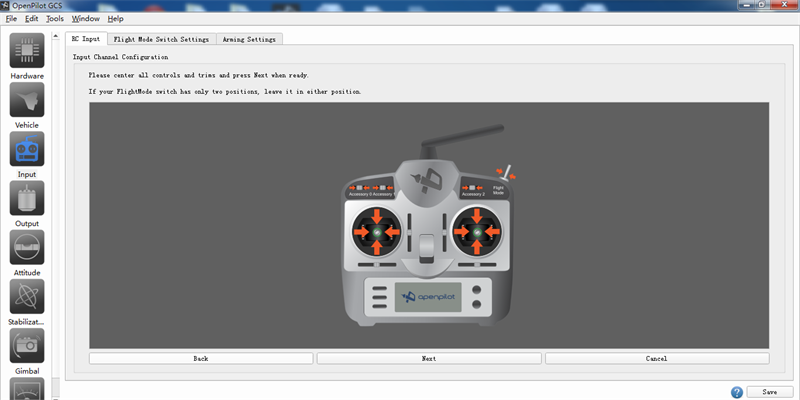
Next,根据屏幕指示去操作遥控器,分别对油门、横滚、俯仰、方向即模式进行校准。
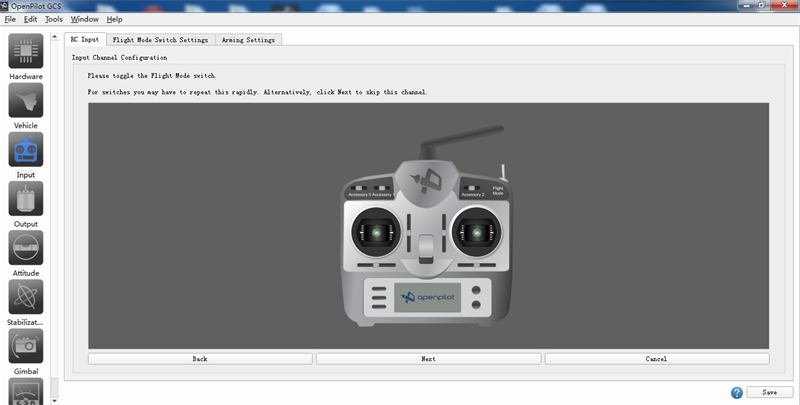
Next,飞行模式校准,这里由于富斯I6的遥控,没有对应的通道切换开关,但是富斯I6的VRA旋钮开关与之对应,可通过旋钮开关进行配置。Next还有关于Accessory0、Accessory1、Accessory2的配置,没有对应开关选择点击Next直接跳过。
各项对应配置完成之后,操作界面将会提示将各通道开关归中。由于遥控没有后面对应的遥控通道,在配置中直接跳过,这里选择跳过。
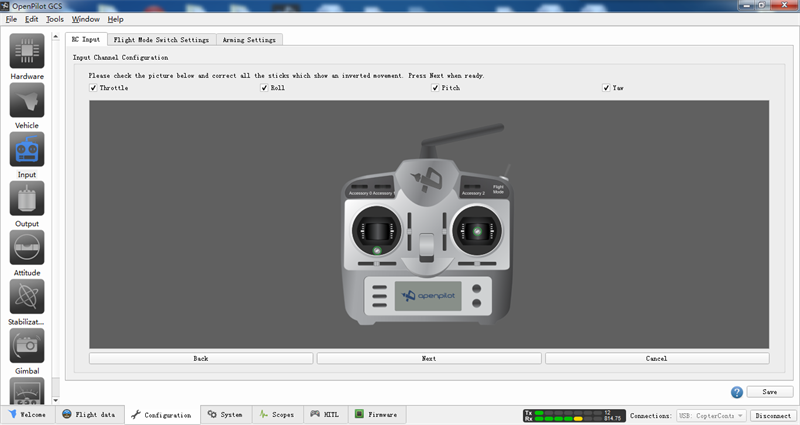
Next,操作提示随意拨动油门、横滚、俯仰、方向摇杆及模式切换开关,观察是否与实际的摇杆动作方向一致。若某个通道方向相反,可以通过勾选其对应通过取反,无需在遥控器上配置,如图所示。
截止以上,遥控的通道操作基本配置完成,点击右下角Save保存,Next进入遥控的解锁配置操作,CC3D的地面站在配置遥控时默认把油门解锁关闭,解锁方式根据自己的个人习惯而定,提供自定义解锁方式,下面还有一个配置栏是设定无信号接收等待时间自动上锁,默认为30s。一般我们都会配置解锁操作为:油门拉到最低(throttle off),同时右手摇杆向左横打(Roll Left)。
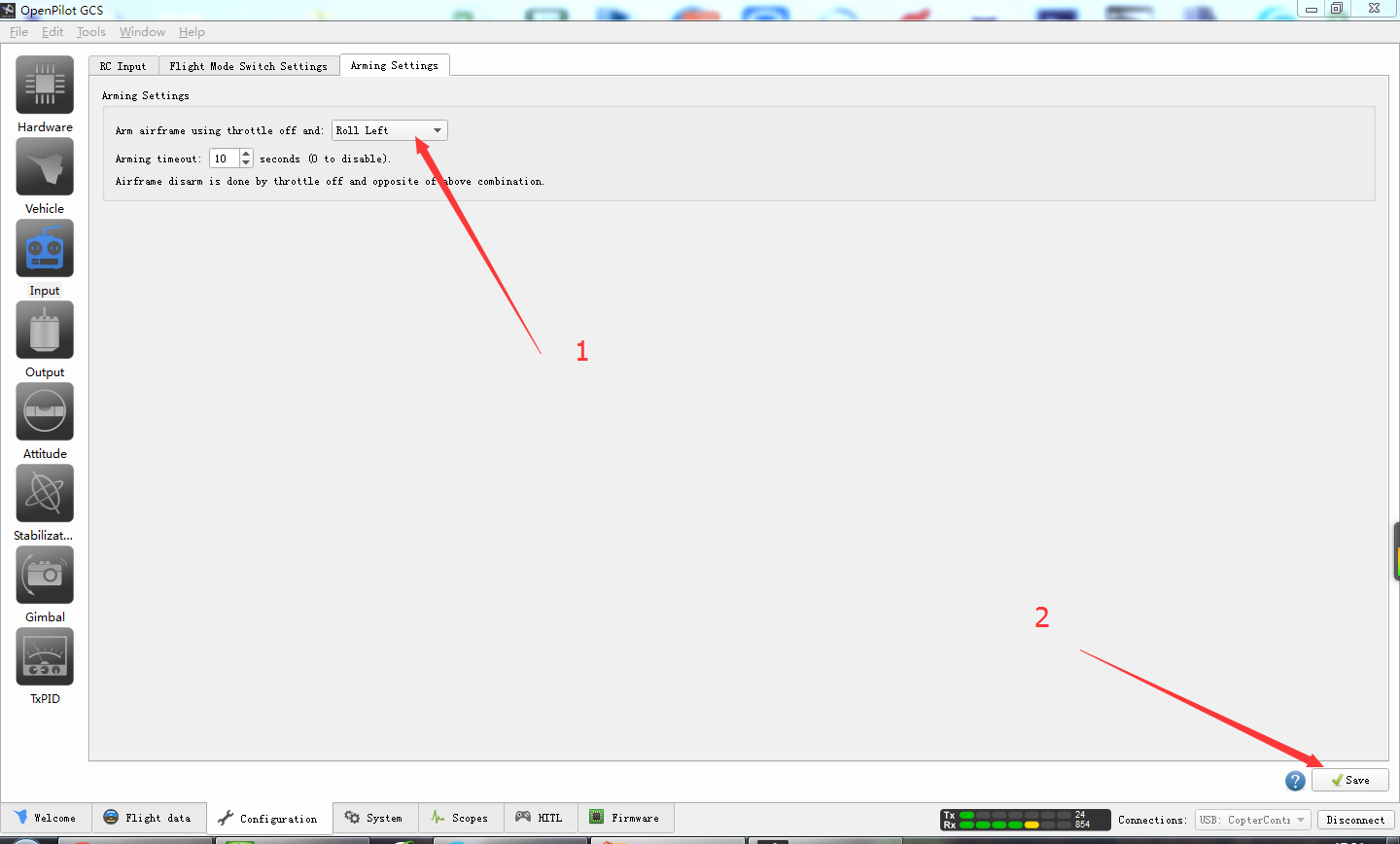
最后点击Save保存设置。
最后可以测试遥控器配置是否正确。为了安全首先去掉桨叶。将CC3D上电,并且连上遥控器,可以看到CC3D上蓝色LED慢速闪烁,接收机上红色LED亮起。按照上面设定的解锁操作解锁飞机。如果解锁成功,CC3D上蓝色LED会快速闪烁。轻推油门到一定值,这时候电机就会开始转动。
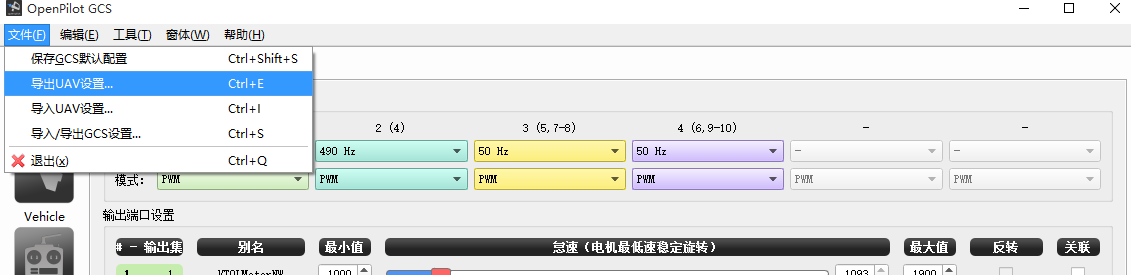
- 导出保存设置信息
一番辛苦的设置之后,要记得导出当前的设置信息,否则,一旦某个地方调整了,或者固件升级了,顺便又抹除了数据,又要再折腾一遍。
5.试飞与调试参数
以上软件,硬件调整完成后,就可以装上螺旋桨进行试飞了。

如果试飞的时候,发生侧倾,翻转等问题的时候,可以参考下图进行细微的调整(一定要记得导出备份数据,调整参数真的很辛苦):
6.BB响
BB响,是一个简单测量整体电压的东西,精度够用,作用明显,有电压显示,低于设定电压就会BB叫,作用就是当电池电压不够的时候,提醒操作者,防止失控。

BB响的接线: BB响9个爪,插电池的充电接口(又称为平衡充接口)黑线在外面,红线在里面。如下图: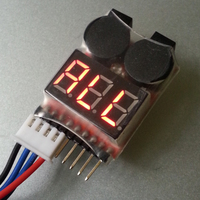
7.Q&A
- 电调,电机必须是统一型号的吗?
开始我也很纠结,不同型号,批次的电机,电调,频率不同,转速不同,会不会出现控制乱套的情况? 实际上,由于CC3D可以独立控制每一路的输出信号,并且依赖自身的陀螺仪来调整姿态,因此,没有这么严格的要求。实际上,就算是同一批次,同一型号的电调,电机,他们也是彼此之间存在误差的。比如,我这个四轴,由于其中的一个银燕的电机,电调烧毁了,我就替换成了一个朗科的电机跟好盈的电调,其他三个还是银燕的,也是能正常飞行的,只是参数要调整一下就好了。